
Contact



Address
Chair of Computer Science 5 (Pattern Recognition)
Martensstrasse 3
91058 Erlangen
Germany
Powered by


Andre Guilherme Linarth M. Sc.
Alumnus of the Pattern Recognition Lab of the Friedrich-Alexander-Universität Erlangen-Nürnberg
Ground Plane Estimation
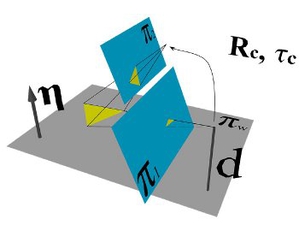
The knowledge of the ground plane parameters is widely used in automotive vision applications in order to, for example, restrict search areas, have a fast depth calculation of points lying on the plane, or segment the road area. When a camera is stably fixed in the vehicle, the ground plane parameters can be calculated a priori by means of calibration patterns. However, such a calibration pre-processing step is not always feasible. A typical case is a camera mounted in a portable device, e.g. a mobile phone or navigation system, which is set up in a vehicle. The user may change the position and orientation of the device, while the provision of calibration patterns in such case would also be unacceptable. In our work, we present a probabilistic method to automatically estimate the ground plane parameters out of forward looking camera images under vehicle motion. Such a methodology can also be used in fixed camera systems, by providing important information on the reliability of (as well as adapting) the factory calibrated parameters over time.
Lane Detection
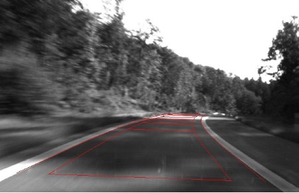
In this project we focus on increasing the reliability of lane detection systems. Lane detection systems are nowadays used by a couple of driver assistance systems in vehicles, as for example Lane Departure or Keeping assistants. Our approach is based on a monocular camera and combines several computer vision methods to provide a good likelihood measurement for the lane boundaries. The results are further tracked by a particle filter. The resulting PDF is then analyzed in order to select single models for the driving lanes. As benefits of such approach is a flexible framework for including further sensed information, as also a more robust system regarding realistic driving scenarios.
Object Detection and Tracking

In this activity the target it to detect and track objects in the vehicle surroundings. The underlying sensors are basically composed by either a single monocular camera or by a stereo setup, eventually accompanied by vehicle odometer data. Detection is performed by means of machine learning algorithms, classifying different appearance classes (e.g. vehicles, pedestrians, traffic signs). Appearance independent obstacle detection is performed thorugh segmentation and tracking of 3D and motion data. Under this scope the works developed include: detection and tracking of vehicles based on Haar Like features, Boosting and Kalman Filters; detection and recognition of speed signs, based on Support Vector Machines; detection and tracking of obstacles without previously known appearance class, based on dense stereo and optical flow. Our current activity focus on the derivation of a machine learning based likelihood model of particle filters, for simultaneous detection and tracking of generic models. For further details of the above mentioned topics, please refer to the publications and theses section.
FAUtonom Team @ Carolo-Cup
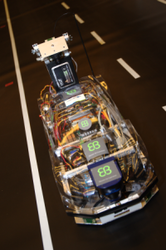
The Carolo-Cup is a competition of 1:10 autonomous model cars built by students. The teams are requested to build vehicles capable to drive autonomously in different scenarios, each of them representing some realistic driving conditions (i.e. parking, lane following, obstacle avoidance and preference at crossings). We promote and assist the students toward these goals. Beside the acquired technical experience, the students are faced to an exciting interdisciplinary work, in which they have the possibility to develop several soft skills, such as team work, decision making and conflict management.
|
|
|
|