
Friedrich-Alexander-Universität Erlangen
Lehrstuhl für Mustererkennung
Martensstraße 3
91058 Erlangen
In the present work, we propose the application of respiratory self-navigation on an incoherent, undersampled Cartesian trajectory. As selfnavigation can be used to compensate for the effects of respiratory motion along the superior-inferior (SI) direction, the effects of motion perpendicular to this direction, such as chest wall motion, remain uncompensated and cause motion artifacts. Hence, iterative reconstruction was combined with a weighted data fidelity term, based on the information derived from the self-navigation, to suppress these artifacts in image reconstruction. In-vivo experiments were performed on four healthy volunteers and compared to navigatorgated acquisitions featuring identical acquisition and reconstruction.
To utilize the self-navigation properties to correct for 1D respiratory motion along SI direction, data was acquired in a sagittal 3D slice orientation. The maximum value of the respiratory signal derived from self-navigation was used to determine the position of end-expiration for each volunteer. As most of the acquisitions are performed in such respiratory phase, this position was chosen as reference. The effects of motion increase with the respiratory offset with respect to the reference. Therefore, read-outs were weighted according to this distance, using a Gaussian kernel centered at the reference position and with σ = 2.0. The weighting factor W was directly introduced into the data fidelity term of the cost function of the iterative, total variation (TV) regularized, CS-SENSE algorithm.
The presented combination of respiratory motion correction and motion suppression in image reconstruction was able to improve image quality. However, image quality remains a trade-off between undersampling ratio and artifacts due to residual respiratory motion. Further improvements could be obtained by reconstructing different respiratory phases with the proposed method. The resulting images could be combined with affine registration to obtain the final image.
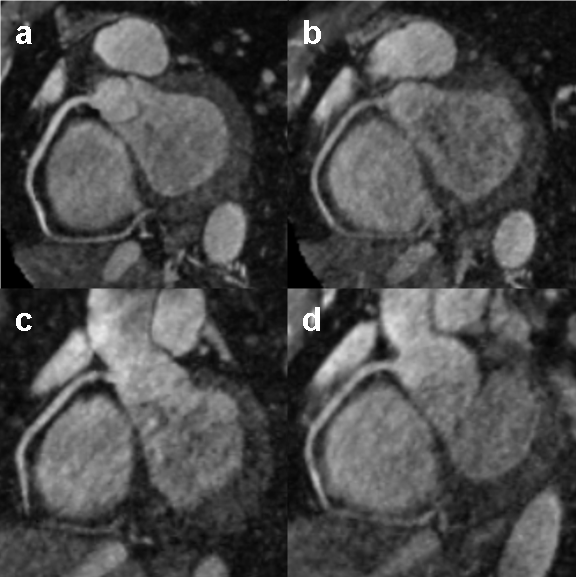 |
Current research in the field of whole-heart coronary MR imaging is driven by the requirement to significantly reduce the total scan time. In this context, acceleration of the data acquisition with parallel imaging or compressed sensing was recently proposed for conventional navigator-gated examinations. In addition, self-navigation has promised to overcome the fundamental restrictions with regards to scan time efficiency of navigator-gating. In this work, data acquisition was segmented in multiple breath-holds and was combined during iterative image reconstruction utilizing self-navigation. The results were individually compared to free-breathing navigator-gated acquisitions.
The proposed combination of the data acquisition in multiple breath-holds with 1D registration of consecutive datasets proofed to significantly reduce the total scan time compared to conventional navigator gating. Furthermore, iterative image reconstruction allowed for high acceleration factors.
|
Current research in the field of whole-heart coronary MR imaging is driven by the requirement to significantly reduce the total scan time. In this context, acceleration of the data acquisition with parallel imaging or compressed sensing was recently proposed for conventional navigator-gated examinations. In addition, self-navigation has promised to overcome the fundamental restrictions with regards to scan time efficiency of navigator-gating. In this work, data acquisition was segmented in multiple breath-holds and was combined during iterative image reconstruction utilizing self-navigation. The results were individually compared to free-breathing navigator-gated acquisitions.
The proposed combination of the data acquisition in multiple breath-holds with 1D registration of consecutive datasets proofed to significantly reduce the total scan time compared to conventional navigator gating. Furthermore, iterative image reconstruction allowed for high acceleration factors.
3-D Endoscopy is an evolving field of research and offers great benefits for minimally invasive procedures. Besides the pure topology, color texture is an inevitable feature to provide an optimal visualization. Therefore, in this paper, we propose a sensor fusion of a Time-of-Flight (ToF) and an RGB sensor. This requires an intrinsic and extrinsic calibration of both cameras. In particular, the low resolution of the ToF camera (64x50 px) and inhomogeneous illumination precludes the use of standard calibration techniques. By enhancing the image data with the use of self-encoded markers for automatic checkerboard detection, a re-projection error of less than 0.23 px for the ToF camera was achieved. The relative transformation of both sensors for data fusion was calculated in an automatic manner.
 |
Utilization of external motion tracking devices is an emerging technology in head motion correction for MRI. However, cross-calibration between the reference frames of the external tracking device and the MRI scanner can be tedious and remains a challenge in practical applications.
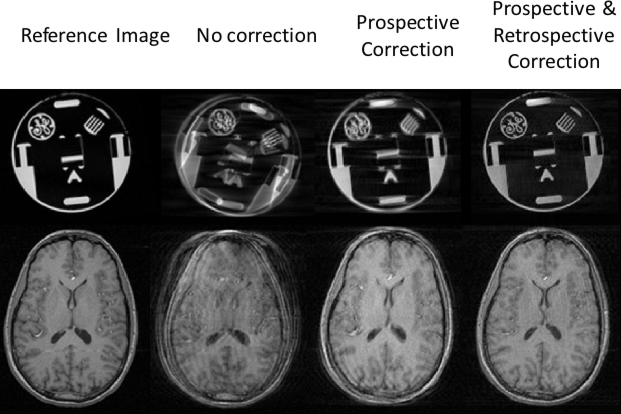
In this study, we present two hybrid methods, both of which combine prospective, optical-based motion correction with retrospective entropy-based autofocusing to remove residual motion artifacts. Our results revealed that in the presence of cross-calibration errors between the optical tracking device and the MR scanner, application of retrospective correction on prospectively corrected data significantly improves image quality.
As a result of this hybrid prospective and retrospective motion correction approach, the requirement for a high-quality calibration scan can be significantly relaxed, even to the extent that it is possible to perform external prospective motion tracking without any prior cross-calibration step if a crude approximation of cross-calibration matrix exists. Moreover, the motion tracking system, which is used to reduce the dimensionality of the autofocusing problem, benefits the retrospective approach at the same time.
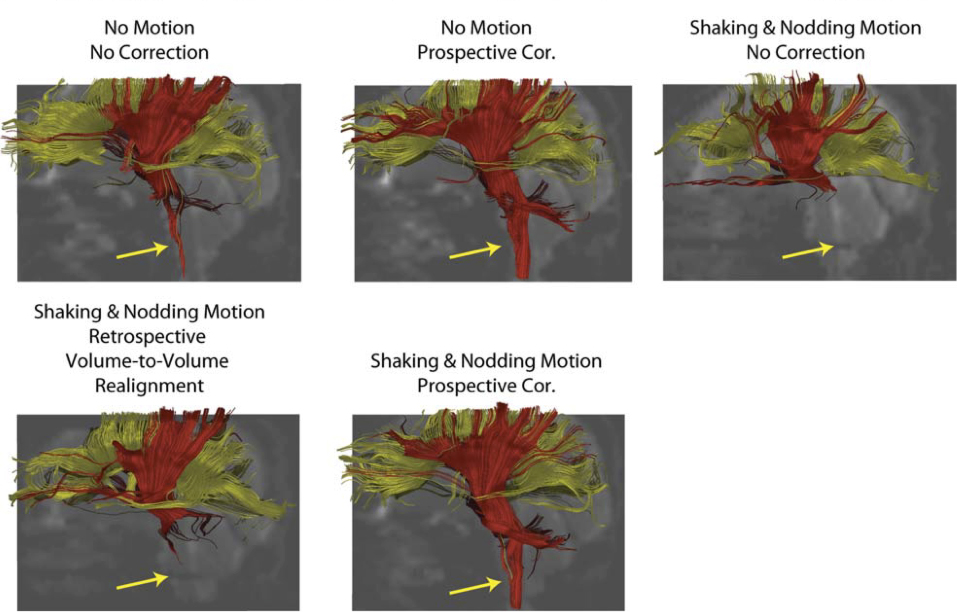 |
Head motion is a fundamental problem in brain MRI. The problem is further compounded in diffusion tensor imaging (DTI) because of long acquisition times, and the sensitivity of the tensor computation to even small misregistration. Particularly, with the more complex variants of DTI, scan times increase excessively, which in turn leads to a higher likelihood of involuntary patient motion, even in subjects who comply and try to remain still. To combat motion artifacts in diffusion tensor imaging, a novel real-time prospective motion correction method was introduced using an in-bore monovision system.
In this study, we perform rigid head motion correction using a prospective monovision-based optical tracking system and compare the effectiveness of retrospective and prospective motion correction for DTI.
Initial in vivo results showed that the proposed system performed superior to retrospective motion correction, especially when through-plane motion was present.
 |
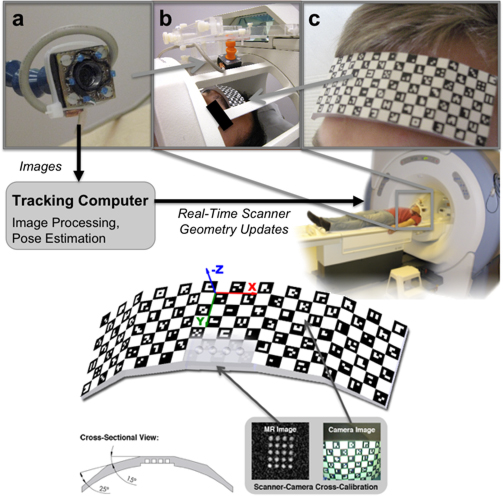
Stereo- and mono-vision systems have been suggested for rigid head motion correction. Since no additional MR-based navigator acquisition is required, these systems can be used with any scanning protocol with only minimal changes to the sequence. However, the usability of optical systems in clinical practice has so far been limited. One of the most important reasons for this is the long and tedious cross calibration times that might take minutes required to find the geometric relationship between the optical and the scanner frame-of-reference. This step usually requires the acquisition of calibration data at the beginning of each patient study.
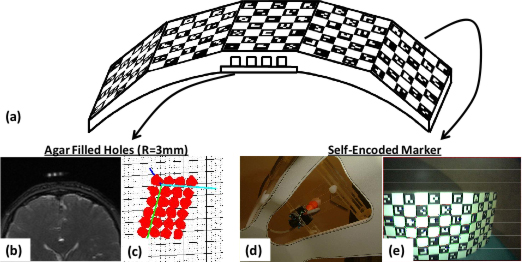
In this work, we propose a way to perform cross-calibration that is acceptable for clinical use. By using a fast scan with a small field-of-view, we were able to run the cross calibration within ~10 seconds. Cross-calibration of optical system and MR scanner is performed with a marker, that is visible in both modalities. While the marker is tracked in the camera image, the acrylic layer at the bottom of the marker contains cylindrical holes with a diameter of 3mm. These are filled with 5% agar solution (Fig1b), which is visible in the MR volume.
In this study, we introduced a short cross-calibration scan that requires only a few seconds. By minimizing the extra overhead associated with such external devices will increase the acceptance in clinical routine.
 |
Motion during data acquisition is an ongoing challenge in MRI. Sadly, motion is often worst in patients that are acutely ill and in which time cannot be afforded to repeat failed exams. This is the case, for example, in patients suffering from acute ischemic stroke or intracranial hemorrhages. For diagnosis of these patients often 3D Time of Flight (TOF) angiograms are performed. Due to unintentional head motion during data acquisition image quality may be degraded or even draw an image non-diagnostic. To mitigate motion artifacts different retrospective and prospective approaches have been suggested. However, these approaches most often require extra navigator data, which can substantially increase sequence TR.
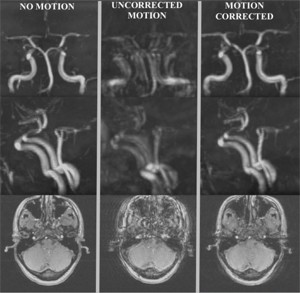
In this work, a prospective motion-correction system is proposed which adapts the scan geometry to patient pose changes in real-time. The pose updates are obtained from a MR compatible camera tracking a self-encoded marker. First experiments were performed with three consecutive scans each consisting of a single 7.7cm 3D slab that covers the Circle of Willis. The resulting images are shown in Figure 1. In the first scan, a motion free reference scan was acquired, while in the following scans a specific motion pattern was performed. Motion during the data acquisition remained uncorrected for the second and correct for the third scan.
First preliminary results show that the proposed system is very effective in correction motion-induced artifacts.
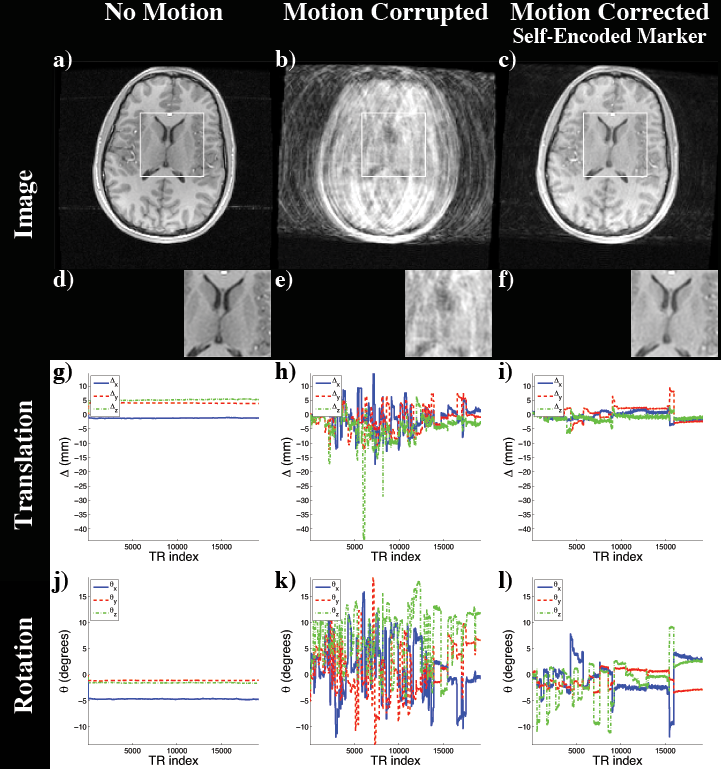
The tracking and compensation of patient motion during a magnetic resonance imaging (MRI) acqusition is an unsolved problem. For brain MRI, a promising approach recently suggested is to track the patient using an in-bore camera (see Figure 1). Features for the tracking were obtained from a checkerboard marker attached to the patient's forehead. However, the possible tracking range of the head pose is limited by the locally attached marker. For pose estimation, the detection algorithm requires the checkerboard marker entirely visible inside the camera’s field of view (FOV). Due to the limited space inside the scanner bore, camera-marker distances from 5-7cm restrict the FOV significantly, which directly affects the possible tracking range.
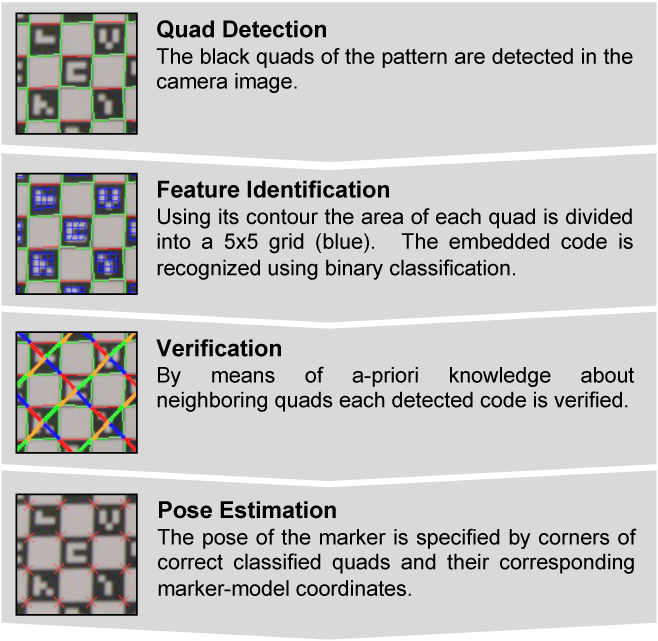
To overcome this shortcoming, we developed a novel self-encoded marker (Figure 1c) where each feature on the pattern is augmented with a 2-D barcode. Hence, the marker can be tracked even if it is not completely visible in the camera image. Compared to the detection of the checkerboard marker, the detection algorithm of the self-encoded marker was extended by a feature identification and verification step as shown in Figure 2. Given the known pattern including the embedded codes of the self-encoded marker, a mesh of all neighboring quads on the pattern was loaded in a look-up table at the start of the software. Thus, this information can be exploited to verify the detected codes. Instead of verifying each code independently, we used the recognized codes of neighboring quads for verification. Thus, the self-encoded marker offers considerable advantages over the checkerboard marker in terms of processing speed, since it makes the correspondence search of feature points and marker-model coordinates, which are required for the pose estimation, redundant.
For evaluation, experiments with computer controlled motion outside the scanner were performed. Phantom studies inside the scanner and first in-vivo experiments showed promising results. Even in the presence of strong continuous motion, the scanner geometry was sufficiently updated using pose estimates of the self-encoded marker. In this way, the structure of the brain was recovered as shown in Figure 3.
In this study, we presented a novel marker design, which overcomes the limited tracking range of existing optical prospective in-bore motion correction systems.
 |
 |
 |
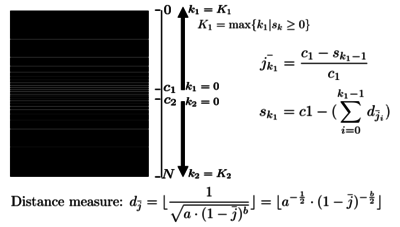
The combination of parallel MRI techniques with compressed sensing ideas is an active field of research. The expected benefit is a gain in aquisition time. The aim of this work is to compare different sampling schemes for highly undersampled non-contrast-enhanced MR angiography (MRA) and to derive an optimized scheme in the combination with iterative reconstruction. In this context, an inverse root pattern is proposed for optimized artifact removal and vessel delineation.
Experiments showed that the image quality obtained with the iterative reconstruction is highly dependent on the chosen pattern. With the inverse root pattern, it was possible to obtain high-quality results at very high undersampling factors.
3-D Endoscopy is an evolving field of research and offers great benefits for minimally invasive procedures. Besides the pure topology, color texture is an inevitable feature to provide an optimal visualization. Therefore, in this paper, we propose a sensor fusion of a Time-of-Flight (ToF) and an RGB sensor. This requires an intrinsic and extrinsic calibration of both cameras. In particular, the low resolution of the ToF camera (64x50 px) and inhomogeneous illumination precludes the use of standard calibration techniques. By enhancing the image data with the use of self-encoded markers for automatic checkerboard detection, a re-projection error of less than 0.23 px for the ToF camera was achieved. The relative transformation of both sensors for data fusion was calculated in an automatic manner.
The combination of parallel MRI techniques with compressed sensing ideas is an active field of research. The expected benefit is a gain in aquisition time. The aim of this work is to compare different sampling schemes for highly undersampled non-contrast-enhanced MR angiography (MRA) and to derive an optimized scheme in the combination with iterative reconstruction. In this context, an inverse root pattern is proposed for optimized artifact removal and vessel delineation.
Experiments showed that the image quality obtained with the iterative reconstruction is highly dependent on the chosen pattern. With the inverse root pattern, it was possible to obtain high-quality results at very high undersampling factors.
The tracking and compensation of patient motion during a magnetic resonance imaging (MRI) acqusition is an unsolved problem. For brain MRI, a promising approach recently suggested is to track the patient using an in-bore camera (see Figure 1). Features for the tracking were obtained from a checkerboard marker attached to the patient's forehead. However, the possible tracking range of the head pose is limited by the locally attached marker. For pose estimation, the detection algorithm requires the checkerboard marker entirely visible inside the camera’s field of view (FOV). Due to the limited space inside the scanner bore, camera-marker distances from 5-7cm restrict the FOV significantly, which directly affects the possible tracking range.
To overcome this shortcoming, we developed a novel self-encoded marker (Figure 1c) where each feature on the pattern is augmented with a 2-D barcode. Hence, the marker can be tracked even if it is not completely visible in the camera image. Compared to the detection of the checkerboard marker, the detection algorithm of the self-encoded marker was extended by a feature identification and verification step as shown in Figure 2. Given the known pattern including the embedded codes of the self-encoded marker, a mesh of all neighboring quads on the pattern was loaded in a look-up table at the start of the software. Thus, this information can be exploited to verify the detected codes. Instead of verifying each code independently, we used the recognized codes of neighboring quads for verification. Thus, the self-encoded marker offers considerable advantages over the checkerboard marker in terms of processing speed, since it makes the correspondence search of feature points and marker-model coordinates, which are required for the pose estimation, redundant.
For evaluation, experiments with computer controlled motion outside the scanner were performed. Phantom studies inside the scanner and first in-vivo experiments showed promising results. Even in the presence of strong continuous motion, the scanner geometry was sufficiently updated using pose estimates of the self-encoded marker. In this way, the structure of the brain was recovered as shown in Figure 3.
In this study, we presented a novel marker design, which overcomes the limited tracking range of existing optical prospective in-bore motion correction systems.
|
|
|
|
Utilization of external motion tracking devices is an emerging technology in head motion correction for MRI. However, cross-calibration between the reference frames of the external tracking device and the MRI scanner can be tedious and remains a challenge in practical applications.
In this study, we present two hybrid methods, both of which combine prospective, optical-based motion correction with retrospective entropy-based autofocusing to remove residual motion artifacts. Our results revealed that in the presence of cross-calibration errors between the optical tracking device and the MR scanner, application of retrospective correction on prospectively corrected data significantly improves image quality.
As a result of this hybrid prospective and retrospective motion correction approach, the requirement for a high-quality calibration scan can be significantly relaxed, even to the extent that it is possible to perform external prospective motion tracking without any prior cross-calibration step if a crude approximation of cross-calibration matrix exists. Moreover, the motion tracking system, which is used to reduce the dimensionality of the autofocusing problem, benefits the retrospective approach at the same time.
|
Head motion is a fundamental problem in brain MRI. The problem is further compounded in diffusion tensor imaging (DTI) because of long acquisition times, and the sensitivity of the tensor computation to even small misregistration. Particularly, with the more complex variants of DTI, scan times increase excessively, which in turn leads to a higher likelihood of involuntary patient motion, even in subjects who comply and try to remain still. To combat motion artifacts in diffusion tensor imaging, a novel real-time prospective motion correction method was introduced using an in-bore monovision system.
In this study, we perform rigid head motion correction using a prospective monovision-based optical tracking system and compare the effectiveness of retrospective and prospective motion correction for DTI.
Initial in vivo results showed that the proposed system performed superior to retrospective motion correction, especially when through-plane motion was present.
|
Stereo- and mono-vision systems have been suggested for rigid head motion correction. Since no additional MR-based navigator acquisition is required, these systems can be used with any scanning protocol with only minimal changes to the sequence. However, the usability of optical systems in clinical practice has so far been limited. One of the most important reasons for this is the long and tedious cross calibration times that might take minutes required to find the geometric relationship between the optical and the scanner frame-of-reference. This step usually requires the acquisition of calibration data at the beginning of each patient study.
In this work, we propose a way to perform cross-calibration that is acceptable for clinical use. By using a fast scan with a small field-of-view, we were able to run the cross calibration within ~10 seconds. Cross-calibration of optical system and MR scanner is performed with a marker, that is visible in both modalities. While the marker is tracked in the camera image, the acrylic layer at the bottom of the marker contains cylindrical holes with a diameter of 3mm. These are filled with 5% agar solution (Fig1b), which is visible in the MR volume.
In this study, we introduced a short cross-calibration scan that requires only a few seconds. By minimizing the extra overhead associated with such external devices will increase the acceptance in clinical routine.
|
Motion during data acquisition is an ongoing challenge in MRI. Sadly, motion is often worst in patients that are acutely ill and in which time cannot be afforded to repeat failed exams. This is the case, for example, in patients suffering from acute ischemic stroke or intracranial hemorrhages. For diagnosis of these patients often 3D Time of Flight (TOF) angiograms are performed. Due to unintentional head motion during data acquisition image quality may be degraded or even draw an image non-diagnostic. To mitigate motion artifacts different retrospective and prospective approaches have been suggested. However, these approaches most often require extra navigator data, which can substantially increase sequence TR.
In this work, a prospective motion-correction system is proposed which adapts the scan geometry to patient pose changes in real-time. The pose updates are obtained from a MR compatible camera tracking a self-encoded marker. First experiments were performed with three consecutive scans each consisting of a single 7.7cm 3D slab that covers the Circle of Willis. The resulting images are shown in Figure 1. In the first scan, a motion free reference scan was acquired, while in the following scans a specific motion pattern was performed. Motion during the data acquisition remained uncorrected for the second and correct for the third scan.
First preliminary results show that the proposed system is very effective in correction motion-induced artifacts.