
Contact

 +49-9131-85-27775
+49-9131-85-27775
 +49-9131-85-27270
+49-9131-85-27270
Secretary
| Monday | 8:00 - 12:15 |
| Tuesday | 8:00 - 16:45 |
| Wednesday | 8:00 - 16:45 |
| Thursday | 8:00 - 16:45 |
| Friday | 8:00 - 12:15 |
Address
Lehrstuhl für Informatik 5 (Mustererkennung)
Martensstr. 3
91058 Erlangen
Germany
Powered by
Computer Vision [CV]
Course Description
Computer Vision involves the (semi-) automatic extraction of
information from images. The image data itself can take many forms:
color or black-and-white images, video sequences, multiple cameras,
data from medical scanners, etc. The information that should be
extracted can also vary depending on the application: locating an
object in an image (image database search), precisely measuring the
dimensions of an object (quality control), following a moving item
(surveillance), identifying letters and numbers (optical character
recognition), estimating the position and orientation of a specific
object (robot arm guidance), etc. As a result, the field of computer
vision covers a wide variety of topics, which may sometimes, at first
glance, seem unrelated.
This course provides an introduction to the field of Computer Vision,
focusing on the underlying algorithmic, geometric and optic issues. It
starts with a description of image formation, including geometric,
optic and electronic aspects of the image formation process. Lower
level algorithms are then presented on the extraction of different
types of image features (edge detection, texture, color,
multi-resolution analysis, Hough transform, deformable contours). The
course will also cover topics associated with extracting information
from multiple images (stereo, motion). The last set of topics will
cover higher level analysis like grouping, and classification with
examples on image retrieval and face detection.
Slides
 Introduction: Introduction: | Illustration of the challenges in computer vision, and the current research in Erlangen |
| Image formation: | Lens, photometry, geometric optics |
| Cameras: | Digital image capture |
| Smoothing: | Different types of noise, convolution kernels for smoothing |
| Edges: | Edge detectors like Sobel, Canny or Laplacians of Gaussians |
| Texture: | Texture analysis and synthesis, Shape from Texture |
| Color: | Physical derivation, color spaces |
| Hough transform: | Line and circle detection, generalized Hough transform |
| Deformable contours: | Shape description beyond geometric primitives |
| Stereo: | 3D from two views |
| Multiview geometry: | Solving the correspondence problem |
| Structured light: | 3D from a single view |
| Motion: | Motion analysis, motion field, optical flow |
| Kalman Filter: | Kalman Filter, tracking |
| Particle Filters: | Particle Filters, importance sampling, probabilistic tracking |
| SIFT: | Scale Invariant Feature Transform |
| Case Study: | Building Rome in a Day |
Exercises
The Exercise page is located  here.
here.
Recommended Literature
- E. Trucco, A. Verri. Introductory Techniques fo 3-D Computer Vision. Prentice Hall, Upper Saddle River, New Jersey, USA
- D. A. Forsyth, J. Ponce. Computer Vision - A Modern Approach. Prentice Hall, Upper Saddle River, New Jersey, USA
 Sildes on particle filtering
Sildes on particle filteringRunning Example: Tracking
As a running example a tracking application can be implemented during the course. The benefit of this application is, that it nicely incorporates a lot of the topics covered in the course and thus enables you to get an overall impression of the algorithmic design decisions which have to be made when implementing a more complex application-specific solution. Below you find a list of the basic ingredients for the tracking application along with some illustrative images to provide you a feeling for the basic skills which you will learn in the course and which (if properly stitched together) yield a tracking application.
1. Noise Reduction via Smoothing (images from Robert Fisher, http://homepages.inf.ed.ac.uk/rbf/CVonline/)
Original image:
Smoothed Image:
2. Edge Detection (images from Edan Lerner; http://www.cs.bgu.ac.il/~icbv071/StudentProjects/ICBV052/ICBV-2005-2-Lerner-Edan/)
Original Image:

Detected Edges:
3. Hough Transform (images from homepages.inf.ed.ac.uk/rbf/HIPR2/linedet.htm)
Original Image:

Lines detected via Hough Transform:
4. Bounding Box (images from Barazza, Beremind, Thonnat; http://www-sop.inria.fr/pulsar/personnel/Francois.Bremond/topicsText/eventlearner.html)
Example 1:

Example 2:

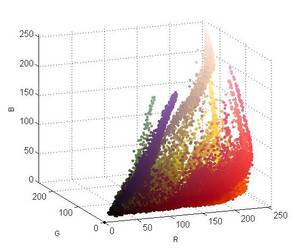
5. Color Histogram
Original Image:

RGB Color Histogram of the Image (thanks to Eva Eibenberger):
6. Background Subtraction (images from http://www.ee.oulu.fi/research/imag/proact/proact.php?page=demonstrations)
Example:

7. Tracking (images from Ashish Derhgawen; ashishrd.blogspot.com/2007/01/real-time-color-based-object-tracking.html )
Example 1:
![]()
Example 2:
![]()