




Heart
Left Heart Ventricle Data sets and Calibration
-
-
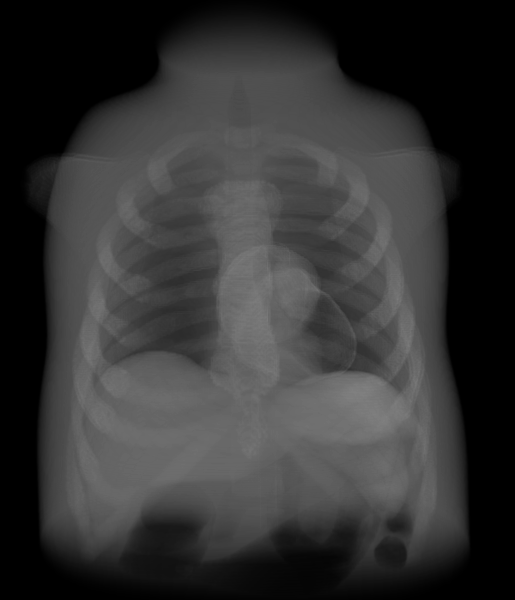
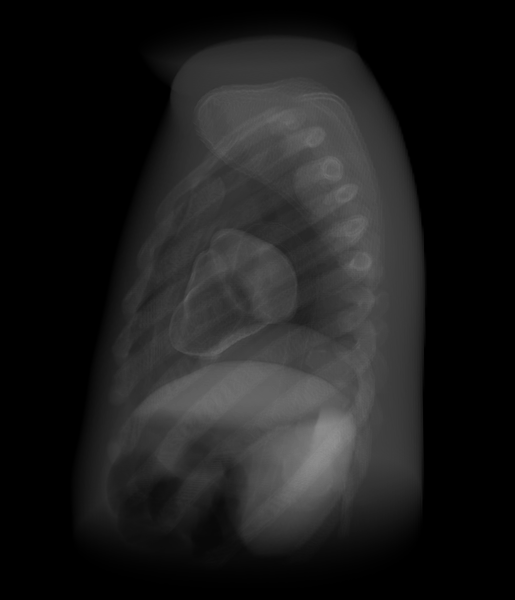
We provide simulated dynamic and static projection images of a human heart with a contrasted left ventricle, aorta and myocardium.
All binary data is stored in row-major order little-endian format. This means, e.g. a projection(u,v) is stored by z images, where each image consists of v rows and each row consists of u columns.
-
World Coordinate System and Projection Matrices
-
-
In order to perform a 3-D reconstruction using the created projection data set we need to define the world-coordinate system of our object space and the basic relationship between a point in world coordinates and a projection image.
World Coordinate System
The origin of our 3-D world-coordinate system is set to the C-arm iso-center, i.e. the center of rotation. The space unit is set to millimeter.
Projection Matrices
The geometry of the image acquisition needs to be defined. The data sets are based on a real-world C-arm calibration. The problem with real-world systems is, that the C-arm is wobbling and does not move exactly on a circular trajectory. Therefore for each projection image a projection matrix in homogenous coordinates is calibrated. The projection matrix of the i-th projection image, in the following denoted
 defines the perspective projection of a voxel
defines the perspective projection of a voxel  in world coordinates and a pixel
in world coordinates and a pixel  of the i-th projection image. It is given by:
of the i-th projection image. It is given by:

The projection matrix encodes a lot of system variables, e.g. the pixel size, rotation, etc.
Here the 3x4 projection matrices which encode the perspective projection of a voxel in the world-coordinate system onto the i-th projection image can be downloaded:
-
Motion Phases
Projection Data
-
-
We offer different kinds of projection data sets for download.
Monochromatic projection data set which consists of N=381 images with a size of 1240x960 pixels each, an isotropic pixel resolution of 0.308 mm, and with a normal sinus rhythm
- Dynamic projection data with cardiac motion
- Raw projection images:
 download
download - Postprocessed projection images for usage with the FDK-Reconstruction algorithm: download
- Raw projection images:
- Static projection data of different heart phases
Monochromatic projection data set which consists of N=133 images with a size of 1240x960 pixels each, an isotropic pixel resolution of 0.308 mm, and with a normal sinus rhythm, lateral phase shift and lateral defect
- Dynamic projection data with normal cardiac motion
- Dynamic projection data with lateral phase shift of 0.2
- Dynamic projection data with lateral phase shift of 0.3
- Dynamic projection data with lateral wall defect
- Static projection data
- Dynamic catheter projection data
Polychromatic projection data set which consists of N=133 images with a size of 1240x960 pixels each and with a normal sinus rhythm, lateral phase shift and lateral defect
- Dynamic projection data with normal cardiac motion
- Dynamic projection data with lateral phase shift of 0.2
- Dynamic projection data with lateral phase shift of 0.3
- Dynamic projection data with lateral wall defect
- Static projection data
- Dynamic catheter projection data
- Dynamic projection data with cardiac motion
-
Contact
-
For questions or comments please feel free to contact
 Kerstin Müller
Kerstin Müller
Data
- fileadmin/Forschung/Projekte/Conrad/data/heart/projections_dynamic_preprocessed.zip
 projections dynamic preprocessed.zip1.6 G
projections dynamic preprocessed.zip1.6 G - fileadmin/Forschung/Projekte/Conrad/data/heart/projections_noise_dynamic.zipprojections noise dynamic.zip701 M
- fileadmin/Forschung/Projekte/Conrad/data/heart/projections_static_30P.zipprojections static 30P.zip1.4 G
- fileadmin/Forschung/Projekte/Conrad/data/heart/projections_static_30P_preprocessed.zipprojections static 30P preprocessed.zip1.6 G
- fileadmin/Forschung/Projekte/Conrad/data/heart/projections_static_80P.zipprojections static 80P.zip1.4 G
- fileadmin/Forschung/Projekte/Conrad/data/heart/projections_static_80P_preprocessed.zipprojections static 80P preprocessed.zip1.6 G
Data with motion defects
- fileadmin/Forschung/Projekte/Conrad/data/heart2/poly_projections_60bpm_133proj.zippoly projections 60bpm 133proj.zip501 M
- fileadmin/Forschung/Projekte/Conrad/data/heart2/poly_projections_60bpm_133proj_preprocessed.zippoly projections 60bpm 133proj preprocessed.zip558 M
- fileadmin/Forschung/Projekte/Conrad/data/heart2/poly_projections_60bpm_catheter_133proj.zippoly projections 60bpm catheter 133proj.zip502 M
- fileadmin/Forschung/Projekte/Conrad/data/heart2/poly_projections_60bpm_catheter_133proj_preprocessed.zippoly projections 60bpm catheter 133proj preprocessed.zip559 M
- fileadmin/Forschung/Projekte/Conrad/data/heart2/poly_projections_60bpm_lateral_defect_133proj.zippoly projections 60bpm lateral defect 133proj.zip501 M
- fileadmin/Forschung/Projekte/Conrad/data/heart2/poly_projections_60bpm_lateral_defect_133proj_preprocessed.zippoly projections 60bpm lateral defect 133proj preprocessed.zip558 M
- fileadmin/Forschung/Projekte/Conrad/data/heart2/poly_projections_60bpm_phase_shift_0.2_133proj.zippoly projections 60bpm phase shift 0.2 133proj.zip501 M
- fileadmin/Forschung/Projekte/Conrad/data/heart2/poly_projections_60bpm_phase_shift_0.2_133proj_preprocessed.zippoly projections 60bpm phase shift 0.2 133proj preprocessed.zip558 M
- fileadmin/Forschung/Projekte/Conrad/data/heart2/poly_projections_60bpm_phase_shift_0.3_133proj.zippoly projections 60bpm phase shift 0.3 133proj.zip501 M
- fileadmin/Forschung/Projekte/Conrad/data/heart2/poly_projections_60bpm_phase_shift_0.3_133proj_preprocessed.zippoly projections 60bpm phase shift 0.3 133proj preprocessed.zip558 M
- fileadmin/Forschung/Projekte/Conrad/data/heart2/poly_projections_static_75P.zippoly projections static 75P.zip501 M
- fileadmin/Forschung/Projekte/Conrad/data/heart2/poly_projections_static_75P_preprocessed.zippoly projections static 75P preprocessed.zip558 M
- fileadmin/Forschung/Projekte/Conrad/data/heart2/projections_60bpm_133proj.zipprojections 60bpm 133proj.zip502 M
- fileadmin/Forschung/Projekte/Conrad/data/heart2/projections_60bpm_133proj_preprocessed.zipprojections 60bpm 133proj preprocessed.zip556 M
- fileadmin/Forschung/Projekte/Conrad/data/heart2/projections_60bpm_catheter_133proj.zipprojections 60bpm catheter 133proj.zip499 M
- fileadmin/Forschung/Projekte/Conrad/data/heart2/projections_60bpm_catheter_133proj_preprocessed.zipprojections 60bpm catheter 133proj preprocessed.zip553 M
- fileadmin/Forschung/Projekte/Conrad/data/heart2/projections_60bpm_lateral_defect_133proj.zipprojections 60bpm lateral defect 133proj.zip502 M
- fileadmin/Forschung/Projekte/Conrad/data/heart2/projections_60bpm_lateral_defect_133proj_preprocessed.zipprojections 60bpm lateral defect 133proj preprocessed.zip556 M
- fileadmin/Forschung/Projekte/Conrad/data/heart2/projections_60bpm_phase_shift_0.1_133proj.zipprojections 60bpm phase shift 0.1 133proj.zip501 M
- fileadmin/Forschung/Projekte/Conrad/data/heart2/projections_60bpm_phase_shift_0.2_133proj.zipprojections 60bpm phase shift 0.2 133proj.zip502 M