
Contact

 +49-9131-85-27775
+49-9131-85-27775
 +49-9131-85-27270
+49-9131-85-27270
Secretary
| Monday | 8:00 - 12:15 |
| Tuesday | 8:00 - 16:45 |
| Wednesday | 8:00 - 16:45 |
| Thursday | 8:00 - 16:45 |
| Friday | 8:00 - 12:15 |
Address
Lehrstuhl für Informatik 5 (Mustererkennung)
Martensstr. 3
91058 Erlangen
Germany
Powered by

Image-Guided Radiation Therapy (IGRT)
T. Geimer, M. Unberath, A. Birlutiu, O. Taubmann, J. Wölfelschneider, C. Bert, A. Maier
-
In radiation therapy, tumor tracking allows to adjust the beam such that it follows the respiration-induced tumor motion. However, most clinical approaches rely on implanted fiducial markers to locate the tumor and, thus, only provide sparse information.
For estimation of dense internal deformation fields, patient-specific motion models have been proposed. The ground-truth deformation field is obtained from 4D imaging by registration to a reference phase. Recently, range imaging has emerged as a nonintrusive, markerless, high-dimensional surrogate suitable to drive said motion models. However, with increasing surrogate complexity, the challenge is to extract meaningful information from high-dimensional domains.
We present a respiratory motion estimation pipeline using kernel ridge regression to model the internal-external correlation, while also introducint non-linear mappings into the model. Evaluation was conducted in a study on five lung cancer patients. Each patient had at least two 4DCT acquisitions within eight weeks, allowing for strict separation of training on the planning CT and testing on a follow-up CTs. Thus, evaluation is closer to the actual application case than in previous studies where only one 4DCT was available.
Articles in Conference ProceedingsBildverarbeitung für die Medizin 2017, Heidelberg, Deutschland, 12.-14.03.2017, pp. 155-160, 2017, ISBN 978-3-662-54344-3 (BiBTeX, Who cited this?)Proceedings of the 2017 IEEE International Symposium on Biomedical Imaging (2017 IEEE International Symposium on Biomedical Imaging), Melbourne, Australia, 18.04.-21.04.2017, pp. 1036-1039, 2017 (BiBTeX, Who cited this?)
T. Geimer, M. Unberath, O. Taubmann, C. Bert, A. Maier
-
Respiratory motion drastically affects medical procedures in the thoracic and abdominal areas. In the context of medical imaging, breathing motion introduces data inconsistencies requiring the incorporation of motion models into state-of-the-art algorithms.
In external beam radiation therapy, the consequences of respiratory motion may be particularly harmful if not addressed properly. The patient is irradiated with photon or particle beams following an optimized fluence pattern that is the result of treatment planning based on CT imaging. However, respiratory motion typically leads to target volume displacement during irradiation, resulting in less than the therapeutic dose in the target and thus the potential survival of malignant cells. Consequently, real-time target motion detection is necessary to either pause the beam during certain parts of the cycle (gating) or to constantly adjust the fluence pattern following the target volume (tracking).
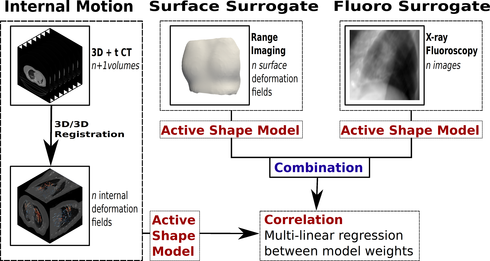
For real-time motion estimation a patient-specific motion model can be trained pre-procedurally, connecting a highly-correlated surrogate signal to the corresponding internal deformation. The ground-truth deformation field is usually obtained from 4-D imaging by registration to a reference phase.
We present a model to estimate dense 3-D internal motion fields from X-ray fluoroscopy without the need for implanted markers using dimensionality reduction and regression techniques. Further, to improve on estimation accuracy and stability the combination of multiple surrogates based on range imaging and fluoroscopy is investigated. Evaluation was performed in a simulation-study on nine 4-D CT patient data sets.
Articles in Conference ProceedingsComputer Assisted Radiology and Surgery (CARS) 2016: Proceedings of the 30th International Congress and Exhibition (Computer Assisted Radiology and Surgery (CARS) 2016), Heidelberg, 22.-25.06.2016, pp. 59-60, 2016 (BiBTeX, Who cited this?)
J. Wasza, S. Bauer, S. Haase, M. Schmid, S. Reichert, J. Hornegger
-
The recent introduction of low-cost devices for real-time acquisition of dense 3-D range imaging (RI) streams has attracted a great deal of attention. Many research communities will benefit from this evolution. However, to date, there exists no open source framework that is explicitly dedicated to real-time processing of RI streams.
In this paper, we present the Range Imaging Toolkit (RITK). The goal is to provide a powerful yet intuitive software platform that facilitates the development of range image stream applications. In addition to its usage as a library within existing software, the toolkit supports developers with an easy-to-use development and rapid prototyping infrastructure for the creation of application-specific RITK modules or standalone solutions. Putting a strong focus on modularity, this application-layer allows for distribution and reuse of existing modules. In particular, a pool of dynamically loadable plugins can be assembled into tailored RI processing pipelines during runtime. RITK puts emphasis on real-time processing of range image streams and proposes the use of a dedicated pipeline mechanism. Furthermore, we introduce a powerful and convenient interface for range image processing on the graphics processing unit (GPU). Being designed thoroughly and in a generic manner, the toolkit is able to cope with the broad diversity of data streams provided by available RI devices and can easily be extended by custom range imaging sensors or processing modules.
RITK is an open source project and is publicly available under
 www.cs.fau.de/ritk.Articles in Conference ProceedingsVMV 2011: Vision, Modeling & Visualization, Berlin, Germany, 04.10.2011, pp. 57-64, 2011, ISBN 978-3-905673-85-2 (BiBTeX, Who cited this?)
www.cs.fau.de/ritk.Articles in Conference ProceedingsVMV 2011: Vision, Modeling & Visualization, Berlin, Germany, 04.10.2011, pp. 57-64, 2011, ISBN 978-3-905673-85-2 (BiBTeX, Who cited this?)