Alumnus of the Pattern Recognition Lab of the Friedrich-Alexander-Universität Erlangen-Nürnberg
Enhancing Quantitative Abdominal Magnetic Resonance Imaging via Compressed Sensing
Projects
Compressed Sensing for Single-Breath-hold Whole-liver T1 Mapping PhD project in cooperation with Siemens Healthcare
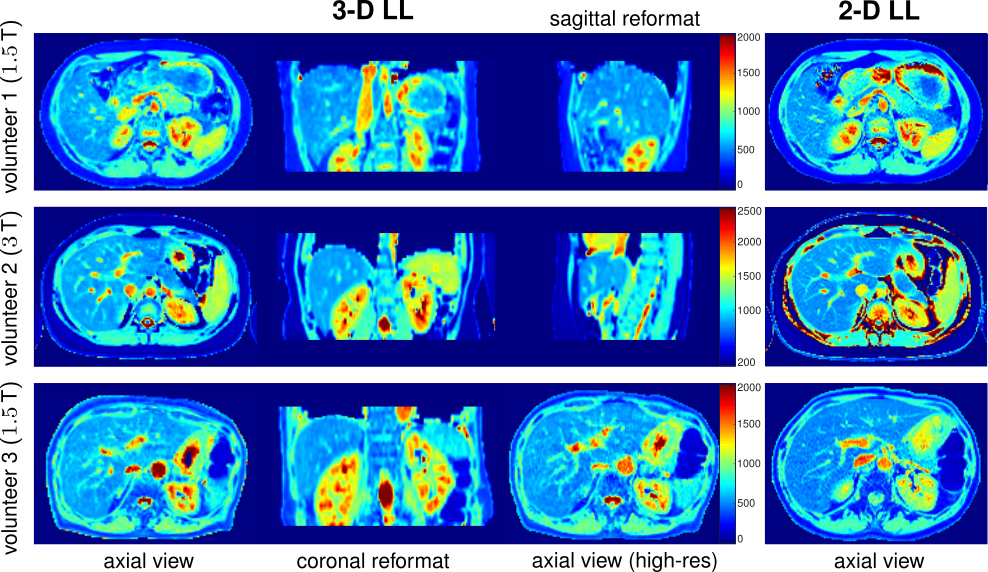
Abdominal T1 mapping can help diagnosing and staging hepatic diseases such as liver cirrhosis or pancreatitis. Yet, accurate methods that are based on sampling the relaxation curve are usually limited to a few slices in case of breathhold imaging. Common 3-D techniques are often based on variable flip angle (VFA) imaging, which is B1 sensitive, even when complemented with an additional B1 mapping acquisition and correction. Look-Locker (LL) sequences are considered more accurate albeit time-consuming, restricting 3-D LL to static scenes only.
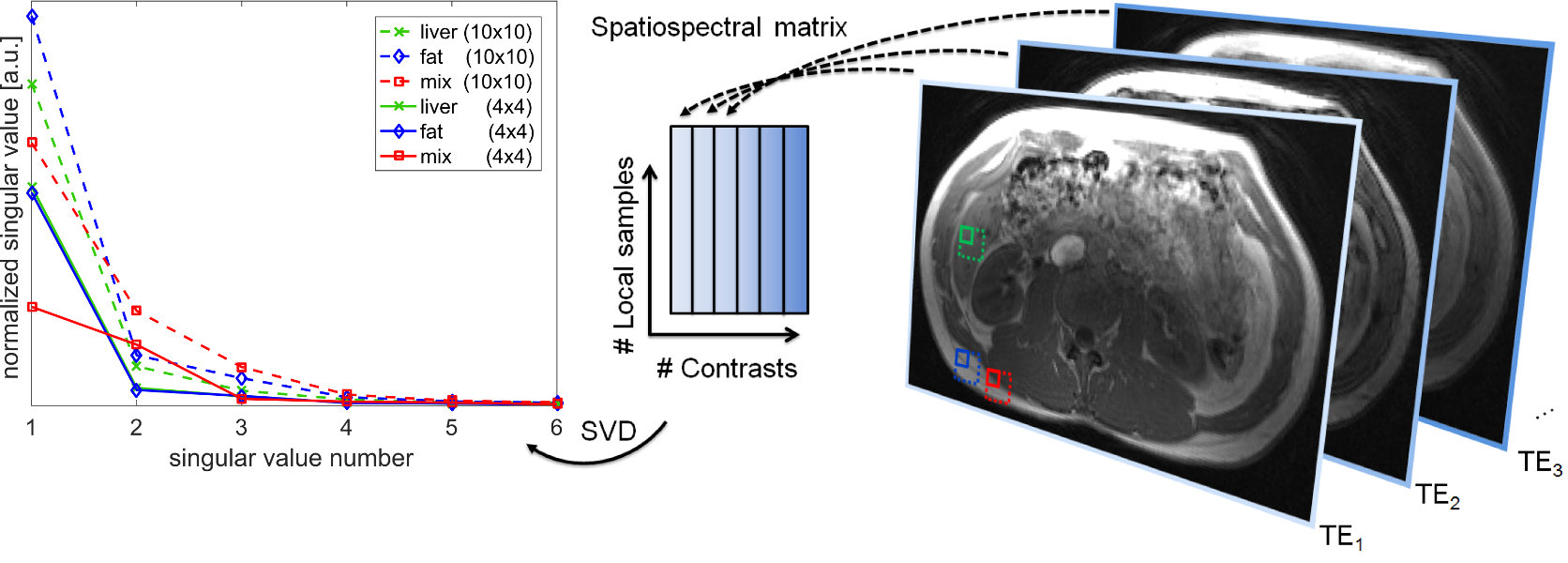
In this project, we aim to achieve the volumetric coverage of VFA methods with the accuracy of LL-based methods in order to perform breath-held volumetric T1 mapping. To this end, we combine an accurate 3-D LL scheme based on k-space segmentation with sparse incoherent sampling in space and time. A joint reconstruction of the 3-D+T data via compressed sensing exploits the spatio-temporal sparsity and ensures consistent quality for the subsequent multi-step T1 mapping. Data from the NIST phantom and 11 volunteers along with reference 2-D Look-Locker acquisitions are used for validation.
Proceedings of the 24th Annual Meeting of the ISMRM (ISMRM 2016) (24th Annual Meeting of the ISMRM (ISMRM 2016)), Singapur, 7.-13.5.2016, pp. 3269, 2016 (BiBTeX, Who cited this?)
Proceedings of the 24th Annual Meeting of the ISMRM (ISMRM 2016) (24th Annual Meeting of the ISMRM (ISMRM 2016)), Singapur, 7.-13.5.2016, pp. 4224, 2016 (BiBTeX, Who cited this?)
Proceedings of the 23rd Annual Meeting of the ISMRM (ISMRM 2015) (23rd Annual Meeting of the ISMRM (ISMRM 2015)), Toronto, ON, Canada, 30.5-5.6.2015, pp. 3652, 2015 (BiBTeX, Who cited this?)
Medical Image Computing and Computer-Assisted Intervention (MICCAI 2015), Munich, Germany, 05.10.2015, pp. 667-674, 2015, ISBN 978-3-319-24570-6 (BiBTeX, Who cited this?)
Finished Projects
Lumen Segmentation of Coronary Arteries in CT Angiography Master's thesis in cooperation with Siemens AG, Corporate Technology
Invasive cardiac angiography (catheterization) is still the standard in clinical practice for diagnosing coronary artery disease (CAD) but it involves a high amount of risk and cost. New generations of CT scanners can acquire high-quality Images of coronary arteries which allow for an accurate identification and delineation of stenoses. Recently, computational flow Dynamics simulation has been applied to coronary blood flow using geometric lumen models extracted from CT angiography (CTA). The computed pressure drop at stenoses proved to be indicative for ischemia-causing lesions, leading to non-invasive Fractional Flow Reserve derived from CTA. Since the diagnostic value of non-invasive procedures for diagnosing CAD relies on an accurate extraction of the lumen, a precise segmentation of the coronary arteries is crucial. As manual segmentation is tedious, time-consuming and subjective, automatic procedures are desirable.
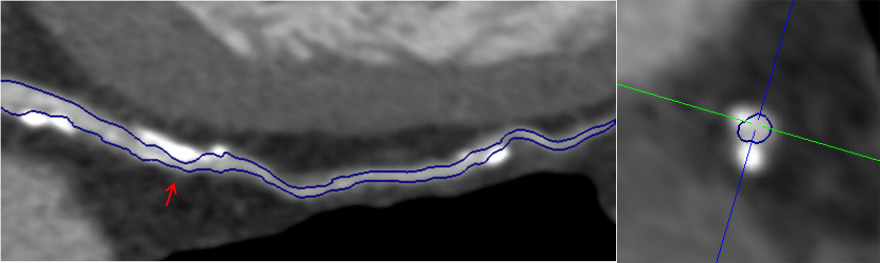
We present a novel fully-automatic method to accurately segment the lumen of coronary arteries in the presence of calcified and noncalcified plaque. Our segmentation framework is based on three main steps: boundary detection, calcium exclusion and surface optimization. A learning-based boundary detector enables a robust lumen contour detection via dense ray-casting. The exclusion of calcified plaque is assured through a novel calcium exclusion technique which allows us to accurately capture stenoses of diseased arteries. The boundary detection results are incorporated into a closed set formulation whose minimization yields an optimized lumen surface. On standardized tests with clinical data, a segmentation accuracy is achieved which is comparable to clinical experts and superior to current automatic methods.
Medical Computer Vision: Algorithms for Big Data (International Workshop, MCV 2014, Held in Conjunction with MICCAI 2014), Cambridge, MA, USA, 18.09.2014, pp. 137-147, 2014, ISBN 978-3-319-13971-5 (BiBTeX, Who cited this?)
Real-time RGB-D Mapping and 3-D Modeling on the GPU using the Random Ball Cover Data Structure
The reconstruction and modeling of three-dimensional scene geometry from temporal point cloud streams is of high interest for a variety of computer Vision applications. With the advent of RGB-D Imaging devices that deliver dense, metric and textured 6-D data in real-time, on-the-fly reconstruction of static Environments has come into reach.
We propose a system for real-time point cloud mapping and scene reconstruction based on an efficient implementation of the iterative closest point (ICP) algorithm on the graphics processing unit (GPU). Compared to recent state-of-the-art approaches that achieve real-time performance using projective ICP schemes that operate on the 3-D scene geometry solely, our method allows to incorporate additional complementary information to guide the reconstruction process. In this work, our nearest neighbor search evaluates both geometric and photometric information in a direct manner, in order to achieve robust mappings at real-time performance. For acceleration of the search space traversal, we exploit the inherent computing parallelism of GPUs. In particular, we have investigated the fitness of the random ball cover (RBC) data structure and search algorithm, originally proposed for high-dimensional problems, to low-dimensional data. In particular, we introduce a scheme that enables both fast RBC construction and queries. The proposed system is validated on indoor scene modeling and object reconstruction scenarios. For dense data from the Microsoft Kinect sensor (640x480 px), our implementation achieved frame-to-frame reconstruction runtimes of < 20 ms on an off-the-shelf consumer GPU.
Consumer Depth Cameras for Computer Vision - Research Topics and Applications Advances in Computer Vision and Pattern Recognition, Springer London, UK, 2013, 27-48 (BiBTeX, Who cited this?)
IEEE International Conference on Computer Vision (ICCV) Workshops (IEEE Workshop on Consumer Depth Cameras for Computer Vision (CDC4CV)), Barcelona, Spain, 12.11.2011, pp. 1161-1167, 2011 (BiBTeX, Who cited this?)

 +49 9131 85 27874
+49 9131 85 27874
 +49 9131 85 27270
+49 9131 85 27270




{kind=link}