
Contact



Address
Chair of Computer Science 5 (Pattern Recognition)
Germany
Powered by


Dr.-Ing. Sebastian Bauer
Alumnus of the Pattern Recognition Lab of the Friedrich-Alexander-Universität Erlangen-Nürnberg
Projects 2012
S. Bauer, B. Berkels, S. Ettl, O. Arold, J. Hornegger, M. Rumpf
-
To manage respiratory motion in image-guided interventions a novel sparse-to-dense registration approach is presented. We apply an emerging laser-based active triangulation (AT) sensor that delivers sparse but highly accurate 3-D measurements in real-time. These sparse position measurements are registered with a dense reference surface extracted from planning data. Thereby a dense displacement field is reconstructed which describes the 4-D deformation of the complete patient body surface and recovers a multi-dimensional respiratory signal for application in respiratory motion management. The method is validated on real data from an AT prototype and synthetic data sampled from dense surface scans acquired with a structured light scanner. In a study on 16 subjects, the proposed algorithm achieved a mean reconstruction accuracy of +-0.22 mm w.r.t. ground truth data.
 Learn more... (video presentation)Articles in Conference ProceedingsMICCAI 2012, Part I, LNCS 7510 (International Conference on Medical Image Computing and Computer Assisted Intervention), Nice, France, 01.10.2012, pp. 414-421, 2012 (BiBTeX, Who cited this?)
Learn more... (video presentation)Articles in Conference ProceedingsMICCAI 2012, Part I, LNCS 7510 (International Conference on Medical Image Computing and Computer Assisted Intervention), Nice, France, 01.10.2012, pp. 414-421, 2012 (BiBTeX, Who cited this?)
J. Wasza, S. Bauer, J. Hornegger
-
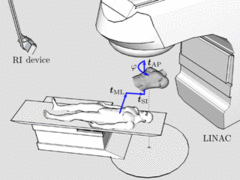
Over the last years, range imaging (RI) techniques have been proposed for patient positioning and respiration analysis in motion com-pensation. Yet, current RI based approaches for patient positioning em-ploy rigid-body transformations, thus neglecting free-form deformations induced by respiratory motion. Furthermore, RI based respiration anal-ysis relies on non-rigid registration techniques with run-times of several seconds. In this paper we propose a real-time framework based on RI to perform respiratory motion compensated positioning and non-rigid sur-face deformation estimation in a joint manner. The core of our method are pre-procedurally obtained 4-D shape priors that drive the intra-procedural alignment of the patient to the reference state, simultaneously yielding a rigid-body table transformation and a free-form deformation accounting for respiratory motion. We show that our method outperforms conventional alignment strategies by a factor of 3.0 and 2.3 in the rotation and translation accuracy, respectively. Using a GPU based implementation, we achieve run-times of 40 ms.
Learn more... (video presentation)Articles in Conference ProceedingsMICCAI 2012, Part II, LNCS 7511 (15th International Conference on Medical Image Computing and Computer Assisted Intervention), Nizza, 01.10.2012, pp. 576-583, 2012 (BiBTeX, Who cited this?)
S. Bauer, S. Ettl, J. Wasza, F. Willomitzer, F. Huber, J. Hornegger, G. Häusler
-
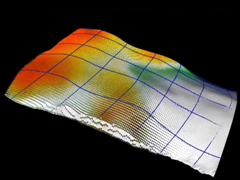
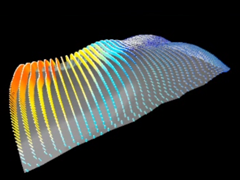
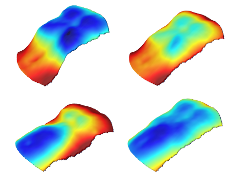
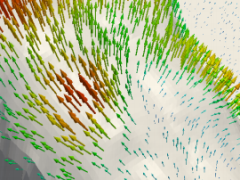
In radiation therapy, studies have shown that external body motion correlates with the internal tumor position. Based on a patient-specific model learnt prior to the first fraction, the tumor location can be inferred from an external surrogate during treatment, superseding intra-fractional radiographic imaging. Existing solutions rely on a single 1-D respiratory surrogate and exhibit a limited level of accuracy due to inter-cycle variation. Recent work indicated that considering multiple regions would yield an enhanced model. Hence, we propose a novel solution based on a single-shot active triangulation sensor that acquires a sparse grid of 3D measurement lines in real time, using two perpendicular laser line pattern projection systems. Building on non-rigid point cloud registration, the elastic displacement field representing the torso deformation with respect to a reference is recovered. This displacement field can then be used for model-based tumor tracking. We present measurement results and non-rigid displacement fields.
Articles in Conference ProceedingsDGaO Proceedings 2012 (113th Annual Meeting of the DGaO / Joint Meeting DGaO - Photonics Cluster Netherlands), Eindhoven, Netherlands, 29.05.2012, pp. P22, 2012 (BiBTeX, Who cited this?)
S. Bauer, J. Wasza, J. Hornegger
-
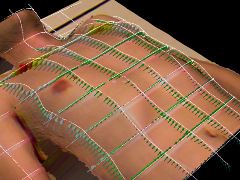
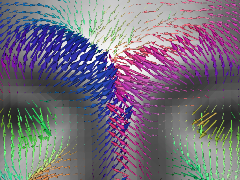
In radiation therapy, the estimation of torso deformations due to respiratory motion is an essential component for real-time tumor tracking solutions. Using range imaging (RI) sensors for continuous monitoring during the treatment, the 3-D surface motion field is reconstructed by a non-rigid registration of the patient’s instantaneous body surface to a reference. Typically, surface registration approaches rely on the pure topology of the target. However, for RI modalities that additionally capture photometric data, we expect the registration to benefit from incorporating this secondary source of information. Hence, in this paper, we propose a method for the estimation of 3-D surface motion fields using an optical flow framework in the 2-D photometric domain. In experiments on real data from healthy volunteers, our photometric method outperformed a geometry-driven surface registration by 6.5% and 22.5% for normal and deep thoracic breathing, respectively. Both the qualitative and quantitative results indicate that the incorporation of photometric information provides a more realistic deformation estimation regarding the human respiratory system.
Articles in Conference ProceedingsBildverarbeitung für die Medizin 2012 (Bildverarbeitung für die Medizin), Berlin, 19.03.2012, pp. 105-110, 2012, ISBN 978-3-642-28501-1 (BiBTeX, Who cited this?)
J. Wasza, S. Bauer, S. Haase, J. Hornegger
-
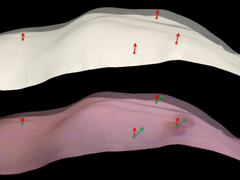
Detection, analysis and compensation of respiratory motion is a key issue for a variety of medical applications, such as tumor tracking in fractionated radiotherapy. One class of approaches aims for predicting the internal target movement by correlating intra-operatively captured body surface deformations to a preoperatively learned deformable model. Here, range imaging (RI) devices assume a prominent role for dense and real-time surface acquisition due to their non-intrusive and markerless nature. In this work we present an RI based statistical model built upon sparse principal axes for body surface deformations induced by respiratory motion. In contrast to commonly employed global models based on principal component analysis, we exploit orthomax rotations in order to enable the differentiation between distinctive and local respiratory motion patterns such as thoracic and abdominal breathing. In a case study, we demonstrate our model's capability to capture dense respiration curves and the usage of our model for simulating realistic distinctive respiratory motion patterns.
Articles in Conference ProceedingsBildverarbeitung für die Medizin 2012 (Bildverarbeitung für die Medizin), Berlin, Germany, 20.03.2012, pp. 316-321, 2012, ISBN 978-3-642-28501-1 (BiBTeX, Who cited this?)
R. Grimm, S. Bauer, J. Sukkau, J. Hornegger, G. Greiner
-
In diagnostic tomographic imaging, patient setup and scanner initialization is a manual, tedious procedure in clinical practice. A fully-automatic detection of the patient’s position, orientation, posture and pose on the patient table holds great potential for optimizing this part of the imaging workflow. We propose a markerless framework that is capable of extracting this information within seconds from either range imaging (RI) or pressure imaging (PI) data. The proposed method is composed of three stages: First, the position and orientation of the reclined patient are determined. Second, the patient’s posture is classified. Third, based on the estimated orientation and posture, an approximate body pose is recovered by fitting an articulated model to the observed RI/PI data. Being a key issue for clinical application, our approach does not require an initialization pose. In a case study on real data from 16 subjects, the performance of the proposed system was evaluated quantitatively with a 3-D time-of-flight RI camera and a pressure sensing mattress (PI). The patient orientation was successfully determined for all subjects, independent of the modality. At the posture recognition stage, our method achieved mean classification rates of 79.4% for RI and 95.5% for PI data, respectively. Concerning the approximate body pose estimation, anatomical body landmarks were localized with an accuracy of ±5.84cm (RI) and ±5.53cm (PI). The results indicate that an estimation of the patient’s position, orientation, posture and pose using RI and PI sensors, respectively, is feasible, and beneficial for optimizing the workflow in diagnostic tomographic imaging. Both modalities achieved comparable pose estimation results using different models that account for modality-specific characteristics. PI outperforms RI in discriminating between prone and supine postures due to the distinctive pressure distribution of the human body.
S. Bauer, J. Wasza, F. Lugauer, D. Neumann, J. Hornegger
-

In this chapter, we present a system for real-time point cloudmapping and scene reconstruction based on an efficient implementation of the iterative closest point (ICP) algorithm on the graphics processing unit (GPU). Compared to state-ofthe- art approaches that achieve real-time performance using projective data association schemes which operate on the 3-D scene geometry solely, our method allows to incorporate additional complementary information to guide the registration process. In this work, the ICP’s nearest neighbor search evaluates both geometric and photometric information in a direct manner, achieving robust mappings in real-time. In order to overcome the performance bottleneck in nearest neighbor search space traversal, we exploit the inherent computation parallelism of GPUs. In particular, we have adapted the randomball cover (RBC) data structure and search algorithm, originally proposed for high-dimensional problems, to low-dimensional RGB-D data. The system is validated on scene and object reconstruction scenarios. Our implementation achieves frame-to-frame registration runtimes of less than 20 ms on an off-the-shelf consumer GPU.
To appear in: Consumer Depth Cameras for Computer Vision - Research Topics and Applications, Advances in Computer Vision and Pattern Recognition, Springer, 2013.
Projects 2011
S. Bauer, J. Wasza, S. Haase, N. Marosi, J. Hornegger
-
In radiation therapy, prior to each treatment fraction, the patient must be aligned to computed tomography (CT) data. Patient setup verification systems based on range imaging (RI) can accurately verify the patient position and adjust the treatment table at a fine scale, but require an initial manual setup using lasers and skin markers. We propose a novel markerless solution that enables a fully-automatic initial coarse patient setup. The table transformation that brings template and reference data in congruence is estimated from point correspondences based on matching local surface descriptors. Inherently, this point-based registration approach is capable of coping with gross initial misalignments and partial matching. Facing the challenge of multi-modal surface registration (RI/CT), we have adapted state-of-the-art descriptors to achieve invariance to mesh resolution and robustness to variations in topology. In a case study on real data from a low-cost RI device (Microsoft Kinect), the performance of different descriptors is evaluated on anthropomorphic phantoms. Furthermore, we have investigated the system's resilience to deformations for mono-modal RI/RI registration of data from healthy volunteers. Under gross initial misalignments, our method resulted in an average angular error of 1.5° and an average translational error of 13.4 mm in RI/CT registration. This coarse patient setup provides a feasible initialization for subsequent refinement with verification systems.
Articles in Conference ProceedingsIEEE International Conference on Computer Vision (ICCV) Workshops (IEEE Workshop on Consumer Depth Cameras for Computer Vision (CDC4CV)), Barcelona, Spain, 12.11.2011, pp. 1175-1181, 2011 (BiBTeX, Who cited this?)
D. Neumann, F. Lugauer, S. Bauer, J. Wasza, J. Hornegger
-
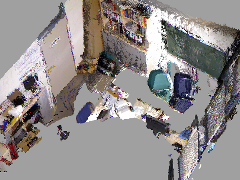
The modeling of three-dimensional scene geometry from temporal point cloud streams is of particular interest for a variety of computer vision applications. With the advent of RGB-D imaging devices that deliver dense, metric and textured 6-D data in real-time, on-the-fly reconstruction of static environments has come into reach. In this paper, we propose a system for real-time point cloud mapping based on an efficient implementation of the iterative closest point (ICP) algorithm on the graphics processing unit (GPU). In order to achieve robust mappings at real-time performance, our nearest neighbor search evaluates both geometric and photometric information in a direct manner. For acceleration of the search space traversal, we exploit the inherent computing parallelism of GPUs. In this work, we have investigated the fitness of the random ball cover (RBC) data structure and search algorithm, originally proposed for high-dimensional problems, for 6-D data. In particular, we introduce a scheme that enables both fast RBC construction and queries. The proposed system is validated on an indoor scene modeling scenario. For dense data from the Microsoft Kinect sensor (640x480 px), our implementation achieved ICP runtimes of < 20 ms on an off-the-shelf consumer GPU.
Articles in Conference ProceedingsIEEE International Conference on Computer Vision (ICCV) Workshops (IEEE Workshop on Consumer Depth Cameras for Computer Vision (CDC4CV)), Barcelona, Spain, 12.11.2011, pp. 1161-1167, 2011 (BiBTeX, Who cited this?)
J. Wasza, S. Bauer, J. Hornegger
-

Recent advances in range imaging (RI) have enabled dense 3-D scene acquisition in real-time. However, due to physical limitations and the underlying range sampling principles, range data are subject to noise and may contain invalid measurements. Hence, data preprocessing is a prerequisite for practical applications but poses a challenge with respect to real-time constraints.
In this paper, we propose a generic and modality-independent pipeline for efficient RI data preprocessing on the graphics processing unit (GPU). The contributions of this work are efficient GPU implementations of normalized convolution for the restoration of invalid measurements, bilateral temporal averaging for dynamic scenes, and guided filtering for edge-preserving denoising. Furthermore, we show that the transformation from range measurements to 3-D world coordinates can be computed efficiently on the GPU. The pipeline has been evaluated on real data from a Time-of-Flight sensor and Microsoft's Kinect. In a run-time performance study, we show that for VGA-resolution data, our preprocessing pipeline runs at ~100 fps on an off-the-shelf consumer GPU.
Articles in Conference ProceedingsIEEE International Conference on Computer Vision (ICCV) Workshops (IEEE Workshop on Consumer Depth Cameras for Computer Vision (CDC4CV)), Barcelona, Spain, 11.12.2011, pp. 1221-1227, 2011 (BiBTeX, Who cited this?)
J. Wasza, S. Bauer, S. Haase, M. Schmid, S. Reichert, J. Hornegger
-
The recent introduction of low-cost devices for real-time acquisition of dense 3-D range imaging (RI) streams has attracted a great deal of attention. Many research communities will benefit from this evolution. However, to date, there exists no open source framework that is explicitly dedicated to real-time processing of RI streams.
In this paper, we present the Range Imaging Toolkit (RITK). The goal is to provide a powerful yet intuitive software platform that facilitates the development of range image stream applications. In addition to its usage as a library within existing software, the toolkit supports developers with an easy-to-use development and rapid prototyping infrastructure for the creation of application-specific RITK modules or standalone solutions. Putting a strong focus on modularity, this application-layer allows for distribution and reuse of existing modules. In particular, a pool of dynamically loadable plugins can be assembled into tailored RI processing pipelines during runtime. RITK puts emphasis on real-time processing of range image streams and proposes the use of a dedicated pipeline mechanism. Furthermore, we introduce a powerful and convenient interface for range image processing on the graphics processing unit (GPU). Being designed thoroughly and in a generic manner, the toolkit is able to cope with the broad diversity of data streams provided by available RI devices and can easily be extended by custom range imaging sensors or processing modules.
RITK is an open source project and is publicly available under
 www.cs.fau.de/ritk.Articles in Conference ProceedingsVMV 2011: Vision, Modeling & Visualization, Berlin, Germany, 04.10.2011, pp. 57-64, 2011, ISBN 978-3-905673-85-2 (BiBTeX, Who cited this?)
www.cs.fau.de/ritk.Articles in Conference ProceedingsVMV 2011: Vision, Modeling & Visualization, Berlin, Germany, 04.10.2011, pp. 57-64, 2011, ISBN 978-3-905673-85-2 (BiBTeX, Who cited this?)
S. Bauer, B. Berkels, J. Hornegger, M. Rumpf
-
Joint ToF Image Denoising and Registration with a CT Surface in Radiation Therapy
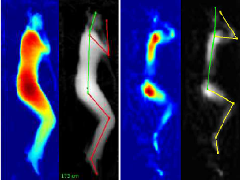
The management of intra-fractional respiratory motion is becoming increasingly important in radiation therapy. Based on in advance acquired accurate 3D CT data and intra-fractionally recorded noisy Time-of-Flight (ToF) range data an improved treatment can be achieved. In this paper, a variational approach for the joint registration of the thorax surface extracted from a CT and a ToF image and the denoising of the ToF image is proposed. This enables a robust intra-fractional full torso surface acquisition and deformation tracking to cope with variations in patient pose and respiratory motion. Thereby, the aim is to improve radiotherapy for patients with thoracic, abdominal and pelvic tumors. The approach combines a Huber norm type regularization of the ToF data and a geometrically consistent treatment of the shape mismatch. The algorithm is tested and validated on synthetic and real ToF/CT data and then evaluated on real ToF data and 4D CT phantom experiments.
Articles in Conference ProceedingsInternational Conference on Scale Space and Variational Methods in Computer Vision (SSVM), Ein-Gedi, The Dead Sea, Israel, 31.05.2011, vol. 6667, pp. 98-109, 2011 (BiBTeX, Who cited this?)
S. Bauer, J. Wasza, K. Müller, J. Hornegger
-
Methods for 2D/3D face recognition typically combine results obtained independently from the 2D and 3D data, respectively. There has not been much emphasis on data fusion at an early stage, even though it is at least potentially more powerful to exploit possible synergies between the two modalities. In this paper, we propose photogeometric features that interpret both the photometric texture and geometric shape information of 2D manifolds in a consistent manner. The 4D features encode the spatial distribution of gradients that are derived generically for any scalar field on arbitrary organized surface meshes. We apply the descriptor for biometric face recognition with a time-of-flight sensor. The method consists of three stages: (i) facial landmark localization with a HOG/SVM sliding window framework, (ii) extraction of photogeometric feature descriptors from time-of-flight data, using the inherent grayscale intensity information of the sensor as the 2D manifold's scalar field, (iii) probe matching against the gallery. Recognition based on the photogeometric features achieved 97.5% rank-1 identification rate on a comprehensive time-of-flight dataset (26 subjects, 364 facial images).
Articles in Conference ProceedingsIEEE Workshop on Applications of Computer Vision (WACV), Kona, HI, USA, 05.01.2011, pp. 196-203, 2011 (BiBTeX, Who cited this?)